#include <IMU_Class.hpp>
|
| enum | axis_t {
axis_x_pos = 0
, axis_x_neg = 1
, axis_y_pos = 2
, axis_y_neg = 3
,
axis_z_pos = 4
, axis_z_neg = 5
} |
| |
| enum | sensor_index_t { sensor_index_accel = 0
, sensor_index_gyro = 1
, sensor_index_mag = 2
} |
| |
| enum | sensor_mask_t { sensor_mask_none = 0
, sensor_mask_accel = 1 << sensor_index_accel
, sensor_mask_gyro = 1 << sensor_index_gyro
, sensor_mask_mag = 1 << sensor_index_mag
} |
| |
|
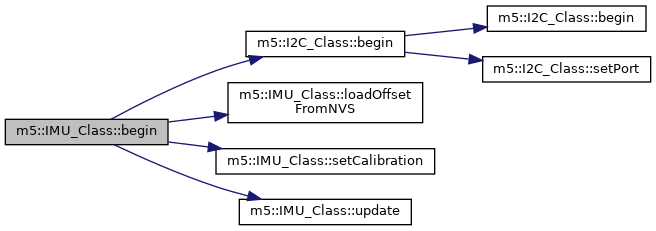
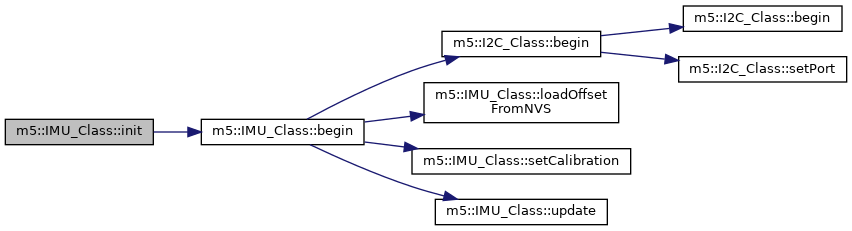
| bool | begin (I2C_Class *i2c=nullptr, board_t board=board_t::board_unknown) |
| |
| bool | init (I2C_Class *i2c=nullptr) |
| |
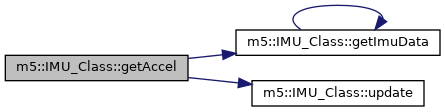
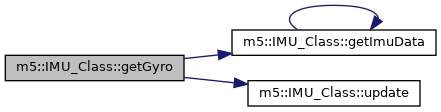
| sensor_mask_t | update (void) |
| |
| void | getImuData (imu_data_t *imu_data) |
| |
| const imu_data_t & | getImuData (void) |
| |
| bool | setAxisOrder (axis_t axis0, axis_t axis1, axis_t axis2) |
| |
| bool | setAxisOrderRightHanded (axis_t axis0, axis_t axis1) |
| |
| bool | setAxisOrderLeftHanded (axis_t axis0, axis_t axis1) |
| |
| bool | getAccel (float *ax, float *ay, float *az) |
| |
| bool | getGyro (float *gx, float *gy, float *gz) |
| |
| bool | getMag (float *mx, float *my, float *mz) |
| |
| bool | getAccelData (float *ax, float *ay, float *az) |
| |
| bool | getGyroData (float *gx, float *gy, float *gz) |
| |
| bool | getGyroMag (float *mx, float *my, float *mz) |
| |
| bool | getTemp (float *t) |
| |
| bool | isEnabled (void) const |
| |
| imu_t | getType (void) const |
| |
| bool | setINTPinActiveLogic (bool level) |
| |
| void | setCalibration (uint8_t accel_strength, uint8_t gyro_strength, uint8_t mag_strength) |
| |
| bool | saveOffsetToNVS (void) |
| |
| bool | loadOffsetFromNVS (void) |
| |
| void | clearOffsetData (void) |
| |
| void | setOffsetData (size_t index, int32_t value) |
| |
| int32_t | getOffsetData (size_t index) |
| |
| int16_t | getRawData (size_t index) |
| |
Definition at line 23 of file IMU_Class.hpp.
◆ axis_t
| Enumerator |
|---|
| axis_x_pos | |
| axis_x_neg | |
| axis_y_pos | |
| axis_y_neg | |
| axis_z_pos | |
| axis_z_neg | |
Definition at line 57 of file IMU_Class.hpp.
◆ sensor_index_t
| Enumerator |
|---|
| sensor_index_accel | |
| sensor_index_gyro | |
| sensor_index_mag | |
Definition at line 67 of file IMU_Class.hpp.
◆ sensor_mask_t
| Enumerator |
|---|
| sensor_mask_none | |
| sensor_mask_accel | |
| sensor_mask_gyro | |
| sensor_mask_mag | |
Definition at line 74 of file IMU_Class.hpp.
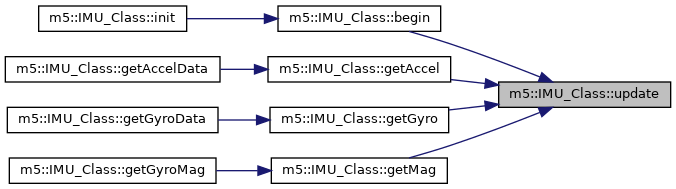
◆ begin()
◆ clearOffsetData()
| void m5::IMU_Class::clearOffsetData |
( |
void |
| ) |
|
◆ getAccel()
| bool m5::IMU_Class::getAccel |
( |
float * |
ax, |
|
|
float * |
ay, |
|
|
float * |
az |
|
) |
| |
◆ getAccelData()
| bool m5::IMU_Class::getAccelData |
( |
float * |
ax, |
|
|
float * |
ay, |
|
|
float * |
az |
|
) |
| |
|
inline |
◆ getGyro()
| bool m5::IMU_Class::getGyro |
( |
float * |
gx, |
|
|
float * |
gy, |
|
|
float * |
gz |
|
) |
| |
◆ getGyroData()
| bool m5::IMU_Class::getGyroData |
( |
float * |
gx, |
|
|
float * |
gy, |
|
|
float * |
gz |
|
) |
| |
|
inline |
◆ getGyroMag()
| bool m5::IMU_Class::getGyroMag |
( |
float * |
mx, |
|
|
float * |
my, |
|
|
float * |
mz |
|
) |
| |
|
inline |
◆ getImuData() [1/2]
| void m5::IMU_Class::getImuData |
( |
imu_data_t * |
imu_data | ) |
|
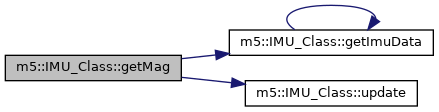
◆ getImuData() [2/2]
| const imu_data_t& m5::IMU_Class::getImuData |
( |
void |
| ) |
|
|
inline |
◆ getMag()
| bool m5::IMU_Class::getMag |
( |
float * |
mx, |
|
|
float * |
my, |
|
|
float * |
mz |
|
) |
| |
◆ getOffsetData()
| int32_t m5::IMU_Class::getOffsetData |
( |
size_t |
index | ) |
|
◆ getRawData()
| int16_t m5::IMU_Class::getRawData |
( |
size_t |
index | ) |
|
◆ getTemp()
| bool m5::IMU_Class::getTemp |
( |
float * |
t | ) |
|
◆ getType()
| imu_t m5::IMU_Class::getType |
( |
void |
| ) |
const |
|
inline |
◆ init()
| bool m5::IMU_Class::init |
( |
I2C_Class * |
i2c = nullptr | ) |
|
|
inline |
◆ isEnabled()
| bool m5::IMU_Class::isEnabled |
( |
void |
| ) |
const |
|
inline |
◆ loadOffsetFromNVS()
| bool m5::IMU_Class::loadOffsetFromNVS |
( |
void |
| ) |
|
◆ saveOffsetToNVS()
| bool m5::IMU_Class::saveOffsetToNVS |
( |
void |
| ) |
|
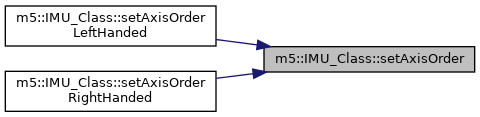
◆ setAxisOrder()
◆ setAxisOrderLeftHanded()
| bool m5::IMU_Class::setAxisOrderLeftHanded |
( |
axis_t |
axis0, |
|
|
axis_t |
axis1 |
|
) |
| |
◆ setAxisOrderRightHanded()
| bool m5::IMU_Class::setAxisOrderRightHanded |
( |
axis_t |
axis0, |
|
|
axis_t |
axis1 |
|
) |
| |
◆ setCalibration()
| void m5::IMU_Class::setCalibration |
( |
uint8_t |
accel_strength, |
|
|
uint8_t |
gyro_strength, |
|
|
uint8_t |
mag_strength |
|
) |
| |
◆ setINTPinActiveLogic()
| bool m5::IMU_Class::setINTPinActiveLogic |
( |
bool |
level | ) |
|
◆ setOffsetData()
| void m5::IMU_Class::setOffsetData |
( |
size_t |
index, |
|
|
int32_t |
value |
|
) |
| |
◆ update()
The documentation for this class was generated from the following files: